Stepper motors move by executing “steps,” determining position simply by counting the number of steps. They are relatively simple to control, provide good torque at low speeds, maintain position effectively, and have a long service life. Stepper motors are the best choice when you need a low-cost, easy-to-control solution without demanding high-speed efficiency and torque.
Hybrid stepper motors combine the advantages of permanent magnet and reactive stepper motors. Since their introduction, they have been widely used in professional printing equipment, intelligent stage lighting equipment, textile machinery, banking equipment, industrial automation, LED production lines, electronic equipment, semiconductor equipment, medical devices, and measurement equipment.
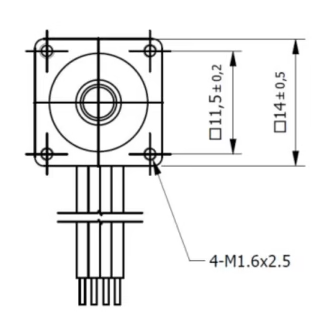
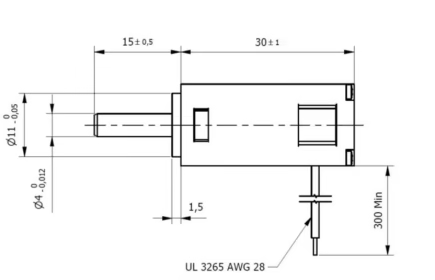
Hybrid stepper motors come in a variety of form factors, including conventional 20mm, 28mm, 35mm, 42mm, 57mm, 60mm, 86mm, and 110mm. Today, we’d like to introduce the WHB14 series, the smallest stepper motor currently on the market. The 14-series NEMA6 hybrid MHB14 stepper motor with a 1.8 step angle and 0.62 Ncm holding torque boasts the common characteristics of stepper motors, including small size, high cost-effectiveness, excellent reliability, smooth operation, accurate positioning, and easy control. Its most notable feature is its compact design, significantly reducing application space. With a 14 mm flange and a 30 mm square body length, this motor combines high torque with a compact design, making it particularly suitable for space-constrained applications such as those in the medical industry, laboratory automation, and optical technology.
Stepper motors typically exhibit high vibration and noise at low speeds. This motor is designed to maintain excellent high torque and low inertia performance while striving to keep operating noise below 40 dBA, providing a quiet and noise-free application environment.
It can also be paired with an encoder for closed-loop operation, equivalent to low-cost servo control. Customization is also possible based on application requirements, such as output shaft type.